Interface d'affichage MIPI dans les systèmes LCD industriels
2026-04-29
10:18
Interface d'affichage MIPI dans les systèmes LCD industriels
Guide pratique de l'ingénieur : sélection des interfaces de données (DSI), des couches physiques (PHY), conception des circuits imprimés (PCB) et déploiement concret d'interfaces homme-machine (IHM)
Par l'équipe technique de Kadi Display | www.kadidisplay.com

Des smartphones aux chaînes de production : le parcours inattendu de MIPI
Voici un point rarement abordé dans les analyses de fiches techniques : l’interface de l’écran de votre automate programmable industriel a très probablement été conçue à l’origine pour un téléphone Nokia ou Samsung. Ce n’est pas un reproche, bien au contraire : c’est ce qui explique son excellent fonctionnement.
L'Alliance MIPI a été créée en 2003. Ses membres fondateurs — Arm, Nokia, STMicroelectronics et Texas Instruments — poursuivaient un objectif précis et concret : empêcher chaque fabricant de téléphones de développer son propre bus interne pour connecter les processeurs aux capteurs photo et aux écrans. Cette fragmentation engendrait des coûts supplémentaires pour tous. Dès 2005, la première spécification de l'interface série d'affichage (DSI) était publiée. En 2010, elle était intégrée à la quasi-totalité des smartphones commercialisés. En 2015, les concepteurs industriels ont commencé à s'y intéresser de près.
Qu'est-ce qui a provoqué cette transition ? Plusieurs facteurs se sont conjugués. Les exigences en matière d'interfaces homme-machine (IHM) en usine imposaient des résolutions que le RGB parallèle ne pouvait tout simplement pas gérer assez rapidement sans transformer les circuits imprimés en véritables nids de connecteurs à 40 broches. Les équipements d'imagerie médicale nécessitaient un contrôle plus strict des interférences électromagnétiques (IEM). Les concepteurs de cockpits automobiles souhaitaient éloigner davantage les écrans du SoC, parfois jusqu'à recouvrir tout un panneau de porte. La physique sous-jacente de MIPI s'est avérée être exactement ce dont ces trois secteurs avaient besoin, même si elle n'avait pas été conçue initialement pour eux.
Ce guide explique en détail le fonctionnement du MIPI interface d'affichage Nous aborderons concrètement le fonctionnement de la technologie LVDS : les choix de la couche physique, leur impact sur la conception d’un circuit imprimé, les problèmes fréquents lors de la mise en service des circuits intégrés de pilotage et les points à considérer avant de l’intégrer à votre prochain produit industriel ou médical. Nous verrons également dans quels cas la technologie LVDS traditionnelle reste pertinente, car, soyons honnêtes, elle l’est parfois.
Si vous partez de zéro en matière de choix d'interface d'affichage, consultez la présentation de Kadi Display sur Choisir le meilleur écran pour votre appareil intégré ce document aborde l'arbre de décision dans son ensemble avant d'entrer dans les spécificités du MIPI.
Les bases : ce que fait réellement MIPI DSI
MIPI DSI (Display Serial Interface) est une liaison série point à point. Un émetteur (votre SoC), un récepteur (votre circuit intégré de pilotage d'affichage). C'est tout. Pas d'arbitrage de bus, pas de support partagé. Les données circulent dans un seul sens pour le contenu des pixels, avec un chemin de retour à faible débit pour l'accusé de réception des commandes et les données tactiles sur certaines configurations.
La liaison est constituée de voies. Chaque voie est une paire différentielle : deux conducteurs, des signaux de polarité opposée, avec une annulation du bruit intégrée à la conception physique. L'une de ces voies est dédiée à l'horloge. Les autres transportent les données. La plupart des panneaux industriels fonctionnent avec deux ou quatre voies de données ; des configurations à une seule voie existent, mais leur résolution maximale est d'environ 1080 × 1920 à 60 Hz, et vous atteindrez cette limite plus rapidement que vous ne le pensez si vous ajoutez de la compression.
Deux modes régissent la manière dont le SoC communique avec le panneau. Mode vidéo La méthode la plus simple consiste à ce que l'hôte transmette en continu des données de pixels, image par image, comme un ancien écran cathodique à balayage raster. L'écran ne possède pas de mémoire propre ; il affiche simplement ce qu'il reçoit. La plupart des écrans industriels à fréquence de rafraîchissement élevée fonctionnent ainsi. Mode commande La particularité réside dans le fait que l'écran dispose d'une mémoire tampon d'images intégrée. Le SoC n'envoie des mises à jour que lorsqu'un élément change à l'écran, puis laisse l'écran se rafraîchir automatiquement. Pour un tableau de bord affichant principalement des valeurs de processus statiques avec des alertes ponctuelles, le mode commande permet de réduire considérablement la consommation d'énergie de l'interface, parfois de moitié, voire plus.
Pour une analyse plus approfondie du protocole au niveau des paquets (comment les paquets courts et longs sont structurés, à quoi ressemble la machine à états de l'interface), l'analyse technique de Kadi mérite d'être lue : Interface série d'affichage MIPI (DSI) — Détails du protocole.
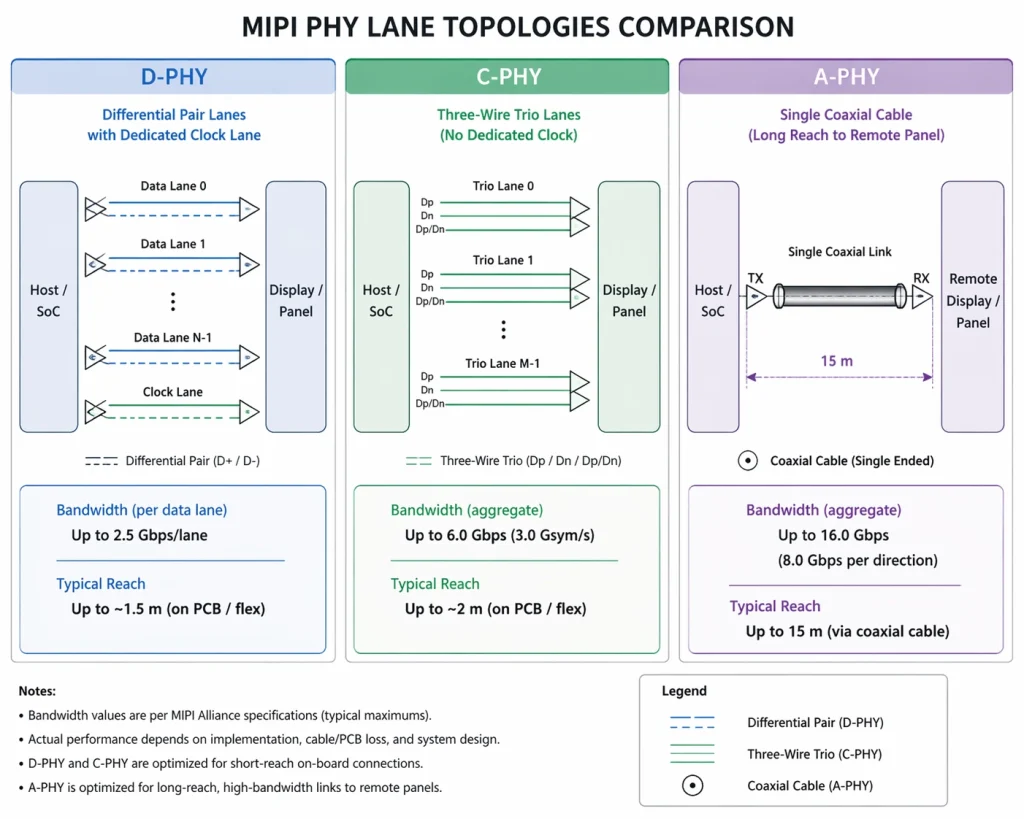
Choix d'une couche physique : D-PHY, C-PHY et A-PHY
C’est là que les ingénieurs ont tendance à se tromper, car MIPI et D-PHY sont souvent utilisés indifféremment dans les descriptions de produits, alors qu’ils ne sont pas synonymes. D-PHY est certes la couche physique la plus courante, mais ce n’est pas la seule option, et les différences entre les trois couches physiques disponibles sont importantes selon le produit que vous développez.
D-PHY : celui que vous utiliserez 90 % du temps
La technologie D-PHY utilise une signalisation différentielle standard avec une voie d'horloge dédiée. La variation de tension est faible (environ 200 mV), ce qui explique en partie son faible rayonnement par rapport à LVDS. Les débits de données ont progressé au fil des révisions successives de la spécification : la version 1.2 plafonnait à 2,5 Gbit/s par voie (10 Gbit/s agrégés sur quatre voies), la version 2.1 atteignait 6,5 Gbit/s par voie, et la version 3.5 introduisait un mode d'horloge intégrée libérant ainsi la voie d'horloge pour les données.
Pour la plupart des écrans industriels de 7 à 10,1 pouces affichant une résolution de 1280 × 800 ou 1920 × 1200 à 60 Hz, la norme D-PHY v1.2 est parfaitement adaptée. La version 2.1 n'est nécessaire que pour la 4K ou des fréquences d'images élevées. Opter pour la dernière spécification alors que les puces plus anciennes prennent en charge nativement la v1.2 ne fait qu'ajouter de la complexité inutile à la configuration.
Le comportement de la gestion de l'alimentation a une incidence pratique. Le D-PHY bascule entre le mode haute vitesse (HS, pour les données de pixels) et le mode basse consommation (LP, pour la signalisation de contrôle et la mise en veille des voies). Chaque transition dure quelques centaines de nanosecondes. Pour la vidéo en continu, ce délai est imperceptible ; pour les écrans en mode commande envoyant de fréquentes petites mises à jour, il peut s'accumuler, et certains circuits intégrés de pilotage gèrent la transition LP-HS plus efficacement que d'autres. Il est donc conseillé de consulter la fiche technique de votre écran avant de supposer que le mode commande fonctionnera comme prévu.
C-PHY : Lorsque les interférences électromagnétiques constituent une contrainte
Le C-PHY est une option dont personne ne parle jusqu'à ce qu'on se retrouve face à un test de pré-conformité CEM et qu'on constate une défaillance de classe 5 CISPR 25 inexplicable. Au lieu de paires de fils, le C-PHY utilise des trios de fils (trois conducteurs par voie, codage de symboles triphasé). Chaque transition de symbole transporte environ 2,28 bits, ce qui permet de traiter davantage de données par front d'horloge. L'avantage est que l'énergie spectrale est répartie plus uniformément sur les fréquences au lieu d'être concentrée à la fréquence d'horloge fondamentale. C'est ce qui contribue à réduire les interférences électromagnétiques.
La technologie C-PHY v2.0 peut atteindre un débit agrégé de 44,5 Gbit/s, suffisant pour la 8K non compressée. En pratique, son principal cas d'utilisation industriel est l'imagerie médicale : écrans de portiques de scanners CT, consoles d'échographie, systèmes de visualisation chirurgicale où l'écran est monté à quelques centimètres d'équipements RF haute fréquence et où la nomenclature réglementaire ne permet pas une masse de blindage importante. Si vous n'êtes pas confronté à ce type de situation, la technologie D-PHY est plus simple à mettre en œuvre.
A-PHY : Résolution du problème de longueur de câble
Les interfaces D-PHY et C-PHY sont toutes deux limitées à une portée de câble d'environ un mètre. Cela convient pour une tablette ou un terminal portable. En revanche, c'est insuffisant pour un grand centre d'usinage CNC où l'écran est fixé au poste de l'opérateur à 3 mètres de l'armoire de commande, ou pour le tableau de bord d'un camion où l'écran principal se trouve à 2 mètres du contrôleur de domaine. Ces déploiements nécessitaient traditionnellement des puces de pont SerDes propriétaires, engendrant des coûts supplémentaires, une latence accrue et des coûts de nomenclature supplémentaires.
La technologie A-PHY élimine le besoin de ces ponts. Il s'agit d'un sérialiseur/désérialiseur longue portée, spécifié jusqu'à 15 mètres, fonctionnant à un débit descendant jusqu'à 32 Gbit/s (v2.0) sur câble coaxial standard ou câble à paires torsadées blindées. La liaison montante — pour le tactile, le retour haptique et les métadonnées de la caméra — fonctionne jusqu'à 1,6 Gbit/s. Le taux d'erreur sur les paquets spécifié est de 100 %. 10⁻¹⁹, qui est exceptionnellement agressif ; il est calibré pour les applications critiques en matière de sécurité où un pixel corrompu dans un affichage d'avertissement constitue un incident réglementaire.
L'interface A-PHY constitue le socle physique de l'architecture MIPI Automotive SerDes Solutions (MASS), qui intègre la sécurité fonctionnelle ISO 26262 et la protection du contenu HDCP. Si vous concevez des écrans de combiné d'instruments ou des interfaces homme-machine (IHM) embarquées pour véhicules, c'est cette architecture qu'il faut maîtriser. Pour les systèmes embarqués en général, Guide de mastering MIPI DSI explique comment ces choix de couche physique se traduisent par une conception système réelle.
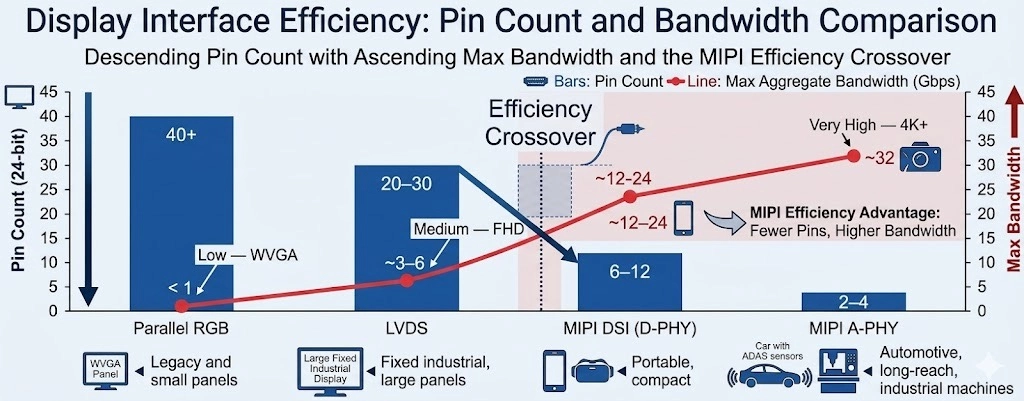
Comparaison pratique entre MIPI DSI, LVDS et RGB parallèle
Avant d'aller plus loin dans la mise en œuvre, il convient de préciser où chaque interface s'intègre réellement, car les supports marketing de MIPI ont tendance à présenter LVDS comme obsolète, ce qui n'est pas tout à fait exact.
Le RGB parallèle est totalement obsolète pour toute résolution supérieure à WVGA. Le nombre de broches est ingérable, les contraintes de distorsion à haute fréquence nécessitent des couches de circuit imprimé superflues, et la consommation électrique est constante quel que soit le contenu. Si vous reprenez un projet qui l'utilise, prévoyez un budget pour une refonte. Si vous partez de zéro et que vous envisagez son utilisation : surtout pas.
Le LVDS, c'est une autre histoire. Pour les écrans de 10 à 21 pouces (moniteurs industriels, panneaux d'imagerie médicale, terminaux de point de vente), le LVDS reste un choix judicieux, surtout si votre SoC ou FPGA prend en charge la sortie LVDS et que la bande passante 4K n'est pas nécessaire. La portée de 10 mètres est un véritable atout, l'écosystème est riche et la procédure de mise en service est bien maîtrisée. Les inconvénients liés à la consommation d'énergie et à l'encombrement sur le circuit imprimé sont réels, mais ils ne font pas automatiquement du LVDS une mauvaise solution pour les équipements industriels fixes où ces contraintes ne sont pas critiques.
Là où MIPI DSI l'emporte clairement : les équipements portables, les appareils alimentés par batterie, toute application où la taille du circuit imprimé est importante, tout ce qui fonctionne en résolution 4K et toute gamme de produits où vous souhaitez exploiter la même propriété intellectuelle SoC d'affichage pour une version grand public et une version industrielle.
Conception de circuits imprimés : là où les implémentations MIPI échouent réellement
Si vous discutez avec des ingénieurs qui ont mis en service du matériel MIPI DSI, la conversation sur les problèmes rencontrés revient presque toujours au circuit imprimé. Le protocole est relativement simple. La mise en service du circuit intégré de pilotage est gérable. C'est au niveau de l'implantation que résident les pièges — et ils sont plus nombreux que ce que les documents techniques ont tendance à souligner.
Le contrôle d'impédance est non négociable.
À 2,5 Gbit/s par voie, vos pistes différentielles se comportent comme des lignes de transmission. Ignorer ce fait entraînera des réflexions, qui se manifesteront par des erreurs de pixels, des fluctuations et des défaillances de verrouillage intermittentes, particulièrement difficiles à déboguer car souvent dépendantes de la température et de la charge. L'objectif est une impédance différentielle de 100 Ω, ±10 %. C'est plus précis qu'il n'y paraît compte tenu des tolérances de fabrication typiques des circuits imprimés, et cela signifie que vous devez spécifier explicitement l'empilement et la géométrie des pistes avec votre fabricant, et non vous fier à une supposition.
Un piège fréquent pour les concepteurs : le calcul de l’impédance différentielle se modifie lorsqu’on effectue le routage au-dessus d’interruptions dans le plan de masse. Il se modifie également lorsqu’on passe à proximité d’un îlot d’alimentation. Il est donc essentiel de planifier l’empilement des couches avant de router les voies MIPI, et non après.
Correspondance des longueurs et sa signification concrète
Les voies doivent avoir la même longueur — la consigne habituelle est « à 5 mils près ». C'est vrai, mais l'exigence moins explicite est que les deux traces au sein de chaque paire différentielle Il est également nécessaire d'assurer une correspondance. En pratique, le décalage intra-paire est souvent plus important que le décalage inter-voies, car les concepteurs s'attachent à ce que la voie d'horloge ait la même longueur que les voies de données, mais laissent les pistes P et N d'une même paire diverger au niveau d'une courbe ou d'une transition de via. Le symptôme est un affichage légèrement corrompu qui fonctionne parfaitement en laboratoire, mais qui présente des dysfonctionnements à température de fonctionnement ou sous l'effet de vibrations.
Vias, connecteurs et plan de masse
Chaque via dans vos pistes MIPI représente une discontinuité d'impédance. Minimisez-les. Lorsqu'une transition de via est inévitable (par exemple, un changement de couche pour un connecteur), ajoutez des vias de liaison de masse autour de chaque via de signal. Le courant de retour nécessite un chemin à faible impédance ; sans ces vias de liaison, il en trouvera un ailleurs, créant ainsi une boucle d'impédance.
Les connecteurs FPC constituent un autre point de défaillance fréquent. L'interface de contact au niveau du connecteur perturbe généralement l'impédance contrôlée. Certaines familles de connecteurs gèrent mieux ce problème que d'autres. Vérifiez les spécifications de perte d'insertion de votre connecteur à la fréquence de signalisation réelle, et non pas seulement en courant continu.
Mise en service des circuits intégrés de commande : ce que les fiches techniques ne vous disent pas
MIPI DSI n'est pas prêt à l'emploi. Cela paraît évident, mais c'est une véritable surprise pour les ingénieurs habitués aux technologies HDMI ou DisplayPort. Il n'y a ni détection de connexion à chaud, ni négociation EDID, ni découverte automatique du mode. Le SoC hôte doit connaître précisément les paramètres de synchronisation requis par votre dalle et envoyer la séquence de commandes d'initialisation du circuit intégré pilote dans le bon ordre avant l'envoi des données de pixels. Une erreur dans l'une de ces étapes et vous n'obtenez rien : un écran noir, un affichage intermittent ou (plus rarement) une dalle qui s'allume mais affiche un rendu incorrect.
Les trois circuits intégrés de commande les plus fréquemment utilisés dans les panneaux industriels de 5 à 10 pouces sont les suivants : ILI9881C (courant sur les écrans 720p en orientation portrait), le EK79007 (standard pour les modules paysage 1024×600 et 1280×800), et le ST7701S (Répandus dans les écrans carrés et les petits écrans industriels). Tous trois sont bien documentés, et tous trois présentent des particularités dans leurs séquences d'initialisation qui ne sont pas bien documentées.
Quelques leçons tirées de l'expérience en matière d'éducation :
- Le délai de réinitialisation de l'écran est presque toujours plus court que ce qu'indique la fiche technique. Si votre écran clignote à l'allumage mais fonctionne correctement une fois en marche, vérifiez que la durée de l'impulsion de réinitialisation et le délai avant la première commande DSI respectent les spécifications minimales, et ajoutez une marge si nécessaire.
- Le framework de pilotes DRM/KMS de Linux est la solution idéale pour tout SoC fonctionnant sous Linux standard. Écrire un pilote de framebuffer à partir de zéro est inutile et engendre des coûts de maintenance importants à long terme. Le pilote de panneau (pour le circuit intégré de pilotage) et le pilote hôte DSI (pour le contrôleur du SoC) sont des modules distincts. De nombreux SoC industriels — NXP i.MX série 8, Rockchip RK3566, Allwinner H6 — disposent de pilotes hôtes DSI intégrés. Votre travail consiste généralement à développer le pilote de panneau, ce qui implique de configurer correctement la séquence d'initialisation et les paramètres de synchronisation.
- Si vous utilisez une plateforme basée sur Raspberry Pi, la mise en service de MIPI DSI possède son propre flux de travail de superposition d'arbre de périphériques spécifique. Kadi Display Guide de connexion DSI étape par étape pour Raspberry Pi Ce document aborde ce sujet en détail, notamment la syntaxe de superposition et les erreurs de configuration courantes.
- Les paramètres de synchronisation (synchronisation horizontale/verticale, synchronisation verticale, largeur d'impulsion) doivent correspondre précisément aux exigences du circuit intégré de commande de l'écran. Ces valeurs sont fournies par le fabricant de l'écran. Si vous utilisez un module Kadi Display, elles figurent dans sa fiche technique. Si vous vous procurez les écrans séparément, considérez les spécifications de synchronisation du fabricant comme une contrainte absolue et non comme une simple suggestion.
Pour une présentation technique complète du DSI au niveau du protocole (machine à états, types de paquets, gestion des voies), le Présentation de l'interface MIPI DSI est une référence utile avant de se lancer dans la mise en service.
Exigences environnementales pour les déploiements industriels
Les appareils électroniques grand public sont conservés dans des salles climatisées. Ce n'est pas le cas des appareils électroniques industriels. Un module d'affichage MIPI fonctionnant parfaitement en laboratoire à 25 °C doit continuer à fonctionner dans une chambre froide à −20 °C, à proximité d'une machine d'emballage où le boîtier atteint 60 °C, dans un terminal de navigation maritime soumis à d'importantes variations d'humidité, et – pour les applications automobiles – sur toute la plage de températures étendue de −40 °C à +85 °C.
L'interface elle-même ne présente pas de comportement dépendant de la température susceptible de poser problème : les paramètres de synchronisation D-PHY sont spécifiés avec une marge suffisante pour les plages de températures industrielles. Les contraintes proviennent de la dalle LCD, du circuit intégré de commande et du système de rétroéclairage. Les dalles industrielles utilisent des mélanges de cristaux liquides dont la viscosité varie moins avec la température, évitant ainsi la lenteur de réponse et les artefacts optiques que l'on observe sur les dalles grand public en dessous de 0 °C. Le rétroéclairage doit également être dimensionné pour l'environnement thermique : l'efficacité des LED diminue avec la température, et un rétroéclairage conçu pour 1 000 nits à 25 °C peut s'avérer insuffisant à −20 °C si le circuit de commande ne compense pas.
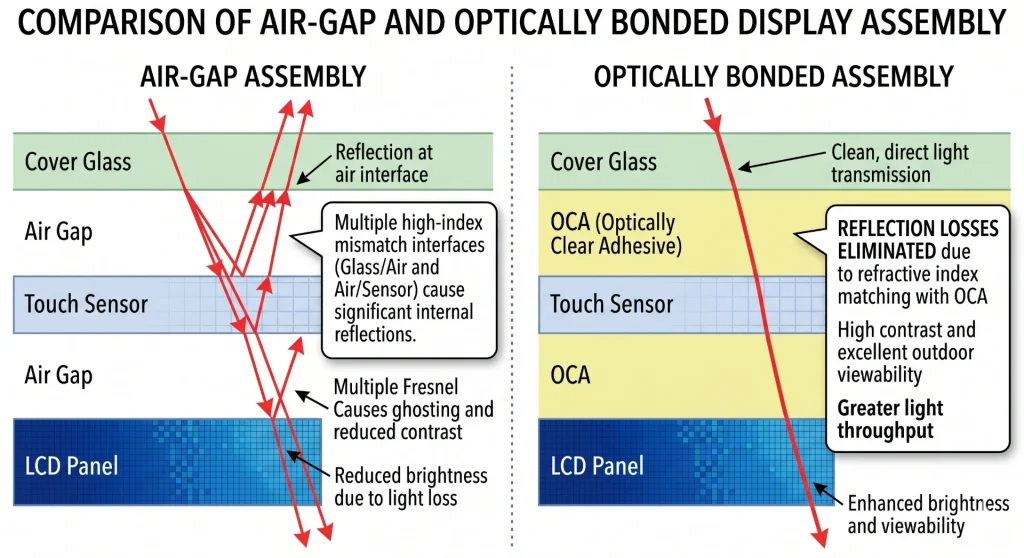
Le collage optique et son importance dans les applications réelles
Le collage optique — qui consiste à fixer directement la vitre de protection à la face de la dalle LCD à l'aide d'un film OCA ou d'une résine OCR, éliminant ainsi l'espace d'air — n'est pas qu'un simple avantage pour la lisibilité en plein soleil. Dans les environnements soumis à des variations de température, un espace d'air engendre des problèmes de condensation : l'humidité s'infiltre dans l'espace et provoque la formation de buée sur l'écran. En cas de vibrations, cet espace permet un mouvement mécanique entre la vitre et la dalle, ce qui peut entraîner un décollement ou une dérive de la calibration tactile.
L'amélioration de la lisibilité obtenue grâce au collage optique en conditions de forte luminosité ambiante est mesurable — des études sur le terrain montrent systématiquement une amélioration du contraste de 30 à 40 % sous la lumière directe du soleil par rapport aux assemblages à entrefer — mais c'est souvent la durabilité qui motive réellement la décision des clients industriels. Le guide de Kadi Display présente une analyse technique complète des différentes options de collage (OCR humide, OCA/SOCA sec). Collage optique — Comment combiner un écran avec un panneau tactile.
Pour une discussion plus générale sur la sélection des écrans à large plage de températures, y compris les choix de mélanges LC et les considérations relatives à la gestion thermique du rétroéclairage, voir : Écrans TFT à large plage de températures pour Applications industrielles.
Où MIPI s'intègre dans les segments d'application industrielle
Automatisation des usines et interface homme-machine (IHM) des processus
La plupart des déploiements MIPI industriels concernent des panneaux IHM : les écrans d'interface opérateur des machines CNC, des contrôleurs de processus et des postes de montage. La taille des panneaux dans ce segment varie généralement de 7 à 10,1 pouces. Les résolutions requises sont de 800 × 480 pour les modèles d'entrée de gamme, 1280 × 800 étant de plus en plus courante, et 1920 × 1200 étant réservée aux systèmes d'affichage haut de gamme. Les spécifications de luminosité pour les environnements industriels commencent généralement à 800 nits et peuvent être plus élevées ; l'éclairage fluorescent au plafond d'une usine est étonnamment puissant, et les reflets sur un panneau peu lumineux dans un environnement en acier inoxydable constituent un véritable problème d'utilisation.
L'ensemble des considérations relatives aux écrans IHM (temps de réponse, technologie tactile, exigences en matière d'angle de vision, spécifications MTBF) est traité en détail dans : Comment les écrans tactiles à cadre ouvert sont utilisés pour l'automatisation des IHM industriellesPour mieux comprendre le fonctionnement des systèmes IHM dans un contexte industriel : Qu’est-ce qu’un écran IHM ? Utilisations courantes, tendances et avenir de l’IHM.
dispositifs médicaux
Les exigences relatives aux écrans médicaux imposent de multiples contraintes simultanées : sécurité électrique selon la norme IEC 60601-1, conformité CEM dans les environnements à forte densité d’équipements RF, résistance chimique pour les protocoles de désinfection et, pour les applications de diagnostic, des normes de précision des couleurs supérieures aux exigences industrielles habituelles. L’interface MIPI DSI avec C-PHY est particulièrement adaptée aux applications médicales car son profil EMI est inférieur à celui de la D-PHY à bande passante équivalente, ce qui facilite la conformité à la norme CISPR dans les environnements à forte densité RF. Le collage optique est devenu la norme pour les équipements médicaux portables : l’étanchéité qu’il assure contre l’humidité et les produits chimiques de nettoyage est aussi importante que l’amélioration optique.
Affichages automobiles et embarqués
C’est dans les applications embarquées que l’architecture A-PHY prend tout son sens. La combinaison des exigences de sécurité fonctionnelle de la norme ISO 26262, des limites CEM de la norme CISPR 25, d’une plage de températures étendue et de la séparation physique entre les contrôleurs de domaine et les écrans crée un ensemble d’exigences qu’aucune solution antérieure à A-PHY ne pouvait satisfaire de manière adéquate sans matériel propriétaire. Si vous concevez des écrans pour combinés d’instruments, des écrans tactiles pour consoles centrales ou des systèmes de divertissement pour passagers arrière, il est essentiel de comprendre le framework MASS dès le début de la phase d’architecture, et non comme une simple réflexion a posteriori.
Compression du flux d'affichage et orientations futures
Avec l'augmentation de la résolution des écrans, les besoins en bande passante brute dépassent les capacités des interfaces D-PHY à grand nombre de voies, sans recours à la couche C-PHY. Un écran 4K à 60 Hz en 24 bits nécessite environ 14,9 Gbit/s de données brutes par pixel. Cela correspond à quatre voies D-PHY v2.1 fonctionnant à un débit quasi maximal, sans marge de sécurité. La compression du flux d'affichage (DSC), intégrée à la spécification MIPI DSI-2 parallèlement à la norme VESA DSC, résout ce problème en réduisant le volume de données d'un facteur 3 à 6 tout en préservant une qualité d'image visuellement sans perte.
La technologie DSC permet de traiter du contenu 4K sur deux voies D-PHY au lieu de quatre, ce qui a des répercussions directes sur la complexité du circuit imprimé, la taille des connecteurs et la consommation d'énergie. La compression est mathématiquement sans perte en termes de perception visuelle ; des évaluations indépendantes montrent systématiquement que les flux compressés et non compressés par DSC sont indiscernables à l'œil nu dans des conditions de visionnage normales.
Au-delà de la DSC, deux tendances méritent d'être suivies pour les applications industrielles. Premièrement, l'adoption d'architectures zonales dans les systèmes automobiles et industriels haut de gamme – où un contrôleur de domaine unique gère plusieurs flux de caméras et d'affichage sur un réseau dorsal commun à haut débit – correspond précisément au scénario de déploiement pour lequel l'A-PHY a été conçu. Deuxièmement, MIPI Touch est en plein développement : cette spécification permet de transporter les données tactiles sur la même liaison série que les données d'affichage, éliminant ainsi le câblage séparé des contrôleurs tactiles I²C ou SPI qui complexifie actuellement chaque interface homme-machine tactile capacitive.
Questions fréquemment posées
Q : La technologie MIPI DSI est-elle plus difficile à mettre en œuvre que la technologie LVDS ?
Honnêtement, oui, au départ. LVDS offre une mise en service plus simple et des tolérances plus larges pour la conception des circuits imprimés. MIPI DSI exige un contrôle d'impédance plus strict, des séquences d'initialisation précises des circuits intégrés de pilotage et (sous Linux) une configuration correcte de l'arbre de périphériques. On obtient ainsi une consommation réduite, une bande passante plus élevée et un encombrement moindre sur le circuit imprimé. Pour les équipes n'ayant aucune expérience préalable de MIPI, prévoyez un cycle de mise en service plus long pour la première conception.
Q : Puis-je utiliser A-PHY pour une machine industrielle où l'écran est situé à 5 mètres du contrôleur ?
Oui, et c'est probablement le bon choix. L'interface A-PHY est spécifiée jusqu'à 15 mètres et élimine les puces de pont SerDes propriétaires que la même application aurait nécessitée avec l'interface D-PHY. Les fonctions de sécurité fonctionnelle du framework MASS sont optionnelles si la conformité à la norme ISO 26262 n'est pas requise ; vous pouvez implémenter l'interface A-PHY uniquement pour ses avantages en termes de portée et de bande passante.
Q: Quels circuits intégrés de commande de panneau sont les plus courants dans les modules MIPI industriels ?
Pour les écrans de 5 à 7 pouces, les modèles ILI9881C (720p portrait) et ST7701S (petit format/carré) sont les plus courants. Pour les écrans paysage de 7 à 10,1 pouces (1024 × 600 à 1280 × 800), le modèle EK79007 est prédominant. Ces trois modèles bénéficient d'une prise en charge Linux stable. Les séquences d'initialisation peuvent varier d'un lot à l'autre chez certains fournisseurs ; si vous commandez des modules en grande quantité, demandez le dump des registres d'initialisation correspondant à votre lot.
Q : Le collage optique affecte-t-il les performances de l'interface MIPI ?
Aucun effet direct sur l'interface. Le collage optique est une technique d'assemblage d'écrans qui influe sur les performances optiques, la durabilité mécanique et l'étanchéité. Il ne modifie en rien le fonctionnement des lignes MIPI. Cela dit, l'association d'une dalle MIPI haute luminosité avec le collage optique est devenue la norme pour les installations industrielles extérieures ou exposées à une forte luminosité ambiante : l'interface et la méthode d'assemblage sont complémentaires et découlent d'un même choix de conception. Plus d'informations : Qu'est-ce que le bondage optique? Un guide pour les écrans industriels.
Q : La technologie MIPI DSI est-elle prise en charge sur Raspberry Pi ?
Oui, tous les modèles Raspberry Pi, du Pi 1 au Pi 5, sont équipés d'un connecteur DSI. Le Pi 5 a considérablement amélioré le contrôleur hôte DSI. La mise en service nécessite la configuration de l'arborescence des périphériques plutôt qu'une détection automatique. Kadi Displays Raspberry Pi MIPI DSI connection guide Ce document décrit l'intégralité du processus, y compris la syntaxe de superposition spécifique et les modes de défaillance courants.
Conclusion
L'interface d'affichage MIPI n'est pas devenue la norme pour les systèmes LCD industriels par simple décision. Son succès repose sur des principes physiques solides : faible amplitude de tension, données sérialisées, réjection différentielle du bruit et une architecture PHY évolutive, en phase avec les exigences de résolution et de bande passante. Le fait que l'industrie mobile ait déjà résolu le problème de la production à grande échelle (circuits intégrés de pilotage, blocs IP SoC, familles de connecteurs) a facilité son adoption dans des secteurs où ces chaînes d'approvisionnement étaient auparavant inexistantes.
En pratique, l'utilisation de MIPI DSI révèle que si le protocole lui-même est gérable, les détails d'implémentation (conception du circuit imprimé, mise en service des circuits intégrés de pilotage, configuration de l'arbre de périphériques) requièrent une attention particulière. Les ingénieurs qui l'abordent comme une interface prête à l'emploi dès le départ rencontrent généralement des difficultés. En revanche, ceux qui l'envisagent comme un problème de ligne de transmission nécessitant un composant logiciel de mise en service parviennent à un fonctionnement fiable.
Pour les conceptions de produits où les contraintes de consommation énergétique, d'espace sur le circuit imprimé et de résolution font de MIPI le choix logique — ce qui concerne la plupart des nouvelles interfaces homme-machine industrielles, des dispositifs médicaux et des écrans automobiles —, il est judicieux d'investir dès le départ dans une mise en œuvre rigoureuse. Les gains sont réels et durables tout au long du cycle de vie du produit.
La gamme complète de modules LCD MIPI industriels de Kadi Display — comprenant des panneaux IPS haute luminosité, des configurations à collage optique, des variantes à large plage de températures et une intégration PCBA personnalisée — est disponible sur : www.kadidisplay.comPour toute question relative aux spécifications ou aux demandes de développement sur mesure, l'équipe technique est joignable directement via le site.
Lecture complémentaire — Ressources techniques Kadi Display
- Qu’est-ce que le MIPI DSI ? Avantages et aperçu technique
- Interface série d'affichage MIPI (DSI) — Référence du protocole
- Un guide étape par étape pour maîtriser MIPI DSI
- Comment connecter un écran LCD MIPI DSI à un Raspberry Pi
- Qu'est-ce que le port MIPI DSI sur Raspberry Pi ?
- Collage optique — Comment combiner un écran avec un panneau tactile
- Qu'est-ce que le bondage optique? Un guide pour les écrans industriels
- Comment les moniteurs à écran tactile Open Frame sont utilisés pour l'automatisation industrielle HMI
- Affichages TFT à grande température pour applications industrielles
- Qu’est-ce qu’un écran IHM ? Utilisations courantes, tendances et avenir de l’IHM
- Écrans MIPI DSI 7 pouces : Principales caractéristiques en 2026
- Choisir le meilleur écran pour votre appareil intégré
Précédent
Interface d'affichage MIPI
Suivant
Rémanence des écrans LCD vs. marquage : Guide des solutions et de la prévention pour l’industrie (édition 2026)
Laisser un commentaire

Derniers blogs et nouvelles
- MIPI DSI Display Compatibility Checklist: 10 Specifications to Match with Your Host Processor Before Ordering
- How to Calculate MIPI DSI Bandwidth and Data Rate per Lane for an Embedded Display
- Why Does an LVDS Display Flicker in Industrial Equipment? Causes and Design Checks
- MIPI DSI Display Not Turning On: Interface, Driver and Initialization Checks for Embedded HMI
- How to Choose Display Interfaces for Rugged Industrial HMI and Panel PC Projects